

Investigadors del Laboratori de Robòtica Blanda de l’ETH Zurich, en col·laboració amb l’Institut de Bioenginyeria de Catalunya, han desenvolupat un sistema biohíbrid que imita la interfície biològica entre els ossos i els músculs, la qual cosa permet una millor transmissió de la força. Aquesta tecnologia podria aplicar-se no només en robòtica, sinó també en el desenvolupament d’implants mèdics.
Els músculs són potents, però flexibles i tous. També tenen un alt grau de control motor fi, poden agarrar fins i tot objectes delicats i són capaços d’autoreparar-se en cas de lesions lleus. Un factor clau en la transmissió precisa i eficaç de la força és el paper dels tendons, que connecten els músculs amb els ossos.
Per transferir aquestes propietats a la robòtica, els científics estan investigant solucions biohíbrides. Aquestes combinen materials sintètics i biològics per replicar l’estructura i la funció del teixit biològic i el moviment dels organismes vius. En el futur, els robots biohíbrids podrien millorar la interacció entre humans i màquines en camps com l’assistència sanitària, la medicina i la robòtica assistencial. Aquest enfocament també podria impulsar el desenvolupament d’implants biohíbrids per a humans.
Un equip de recerca interdisciplinari dirigit pel Laboratori de Robòtica Blanda de l’ETH de Zúrich, amb la col·laboració d’investigadors del grup de Dispositius Nano-Bio Intel·ligents de l’Institut de Bioenginyeria de Catalunya (IBEC), dirigit per Samuel Sánchez, i la Universitat de Barcelona, ha aconseguit crear una innovadora interfície musculosa. El resultat és un model totalment funcional fet de teixit biològic viu que reprodueix l’estructura dels tendons i la seva transició al múscul —l’anomenada unió miotendinosa— i que, alhora, permet una millor integració amb els sistemes tècnics.
«La nostra solució es basa en un actuador bioimprès en 3D que imita estructuralment i funcionalment la connexió natural entre el múscul i l’os», explica Miriam Filippi, autora principal de l’article científic i investigadora del Laboratori de Robòtica Blanda, dirigit pel professor Robert Katzschmann. El múscul i el tendó es van crear a partir de teixit cel·lular biològic i es van connectar a un os fabricat amb material sintètic.
«Aquest estudi representa un gran avenç en el desenvolupament d’unitats funcionals de múscul-tendó, assentant les bases per a sistemes biohíbrids que uneixen la biologia i la robòtica», explica Katzschmann. «Estem donant el següent gran pas cap als robots musculoesquelètics investigant com integrar músculs i tendons reals en unitats funcionals».
La biologia com a model
El repte més gran era que, en la interfície entre els materials biològics i sintètics, les forces sovint es transmeten malament, cosa que provoca pèrdues d’energia. Per resoldre aquest problema, l’equip es va fixar en l’estructura natural del sistema musculoesquelètic, on els tendons actuen com a intermediaris entre els músculs i els ossos. «Desenvolupem un tendó a partir de teixit cel·lular imprès, amb un nivell de rigidesa entre el del múscul viu i el d’un segment rígid que imita l’os. Això permet un acoblament estable entre components biològics tous i components sintètics rígids», afirma Filippi.
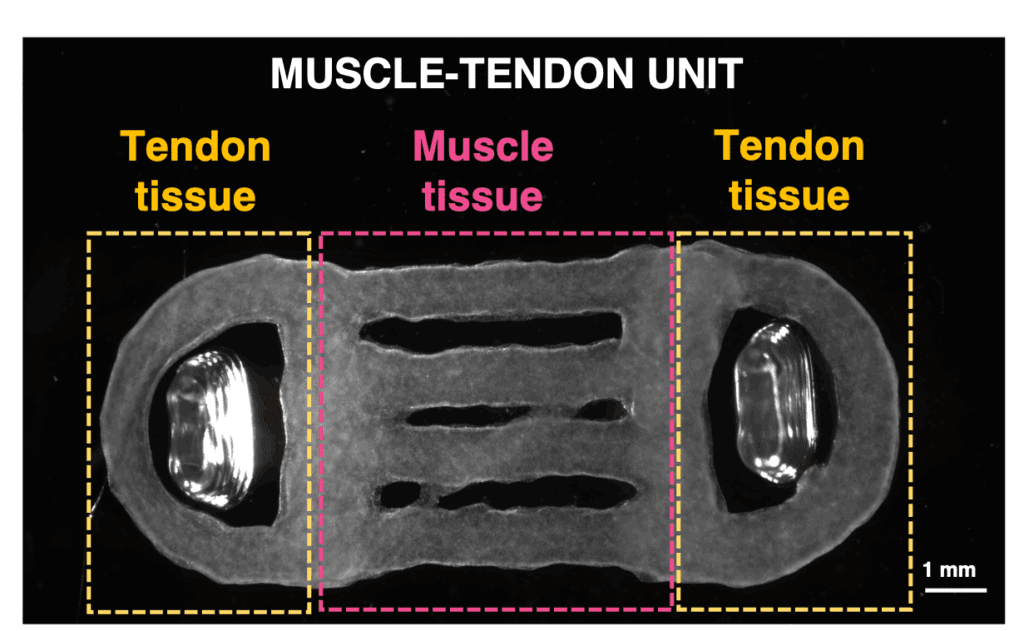
L’actuador viu es va crear mitjançant bioimpressió 3D, amb cèl·lules musculars i ancoratges similars a tendons que contenen cèl·lules de teixit connectiu impreses en una plataforma. Es va utilitzar una anàlisi assistida per ordinador per optimitzar la forma i l’estructura de l’actuador. En les proves d’aplicació inicials, els actuadors bioimpresos en 3D van demostrar una capacitat de contracció fiable i estable a llarg termini, la qual cosa suposa un avanç clau per a l’ús de components biohíbrids en sistemes robòtics.
Aplicacions en medicina
«El treball demostra com es pot aprofitar el teixit biològic dissenyat per reproduir la mecànica dels sistemes musculoesquelètics naturals, la qual cosa suposa un avenç tant en la recerca fonamental com en les aplicacions en els camps de la robòtica tova, la tecnologia bioinspirada i la medicina regenerativa», afirma Katzschmann. Una possible aplicació mèdica és el modelatge biomecànic de l’oïda mitjana, concretament la interacció entre l’estrep (un petit os) i el múscul de l’estrep (Musculus stapedius). Altres possibles usos són les pròtesis adaptatives, els sistemes robòtics integrats biològicament o els teixits de substitució conreats en laboratori.
Adaptat d’una notícia del Departament d’Enginyeria Mecànica i de Processos, ETH Zurich.
Article de referència:
Miriam Filippi, Diana Mock, Judith Fuentes, Mike Y. Michelis, Aiste Balciunaite, Pablo Paniagua, Raoul Hopf, Adina Barteld, Selina Eng, Asia Badolato, Jess Snedeker, Maria Guix, Samuel Sanchez, and Robert K. Katzschmann. Multicellular muscle-tendon bioprinting of mechanically optimized musculoskeletalbioactuators with enhanced force transmission. Science Advances (2025). DOI: 10.1126/sciadv.adv2628



