

Investigadores del Laboratorio de Robótica Blanda de la ETH Zurich, en colaboración con el Instituto de Bioingeniería de Cataluña, han desarrollado un sistema biohíbrido que imita la interfaz biológica entre los huesos y los músculos, lo que permite una mejor transmisión de la fuerza. Esta tecnología podría aplicarse no solo en robótica, sino también en el desarrollo de implantes médicos.
Los músculos son potentes, pero flexibles y blandos. También poseen un alto grado de control motor fino, pueden agarrar incluso objetos delicados y son capaces de autorrepararse en caso de lesiones leves. Un factor clave en la transmisión precisa y eficaz de la fuerza es el papel de los tendones, que conectan los músculos con los huesos.
Para transferir estas propiedades a la robótica, los científicos están investigando soluciones biohíbridas. Estas combinan materiales sintéticos y biológicos para replicar la estructura y la función del tejido biológico y el movimiento de los organismos vivos. En el futuro, los robots biohíbridos podrían mejorar la interacción entre humanos y máquinas en campos como la asistencia sanitaria, la medicina y la robótica asistencial. Este enfoque también podría impulsar el desarrollo de implantes biohíbridos para humanos.
Un equipo de investigación interdisciplinario dirigido por el Laboratorio de Robótica Blanda de la ETH de Zúrich, con la colaboración de investigadores del grupo de Dispositivos Nano-Bio Inteligentes del Instituto de Bioingeniería de Cataluña (IBEC), dirigido por Samuel Sánchez, y la Universidad de Barcelona, ha logrado crear una novedosa interfaz músculo-hueso. El resultado es un modelo totalmente funcional hecho de tejido biológico vivo que reproduce la estructura de los tendones y su transición al músculo —la llamada unión miotendinosa— y que, al mismo tiempo, permite una mejor integración con los sistemas técnicos.
«Nuestra solución se basa en un actuador bioimpreso en 3D que imita estructural y funcionalmente la conexión natural entre el músculo y el hueso», explica Miriam Filippi, autora principal del artículo científico e investigadora del Laboratorio de Robótica Blanda, dirigido por el profesor Robert Katzschmann. El músculo y el tendón se crearon a partir de tejido celular biológico y se conectaron a un hueso fabricado con material sintético.
«Este estudio representa un gran avance en el desarrollo de unidades funcionales de músculo-tendón, sentando las bases para sistemas biohíbridos que unen la biología y la robótica», explica Katzschmann. «Estamos dando el siguiente gran paso hacia los robots musculoesqueléticos investigando cómo integrar músculos y tendones reales en unidades funcionales».
La biología como modelo
El mayor reto era que, en la interfaz entre los materiales biológicos y sintéticos, las fuerzas a menudo se transmiten mal, lo que provoca pérdidas de energía. Para resolver este problema, el equipo se fijó en la estructura natural del sistema musculoesquelético, donde los tendones actúan como intermediarios entre los músculos y los huesos. «Desarrollamos un tendón a partir de tejido celular impreso, con un nivel de rigidez entre el del músculo vivo y el de un segmento rígido que imita al hueso. Esto permite un acoplamiento estable entre componentes biológicos blandos y componentes sintéticos rígidos», afirma Filippi.
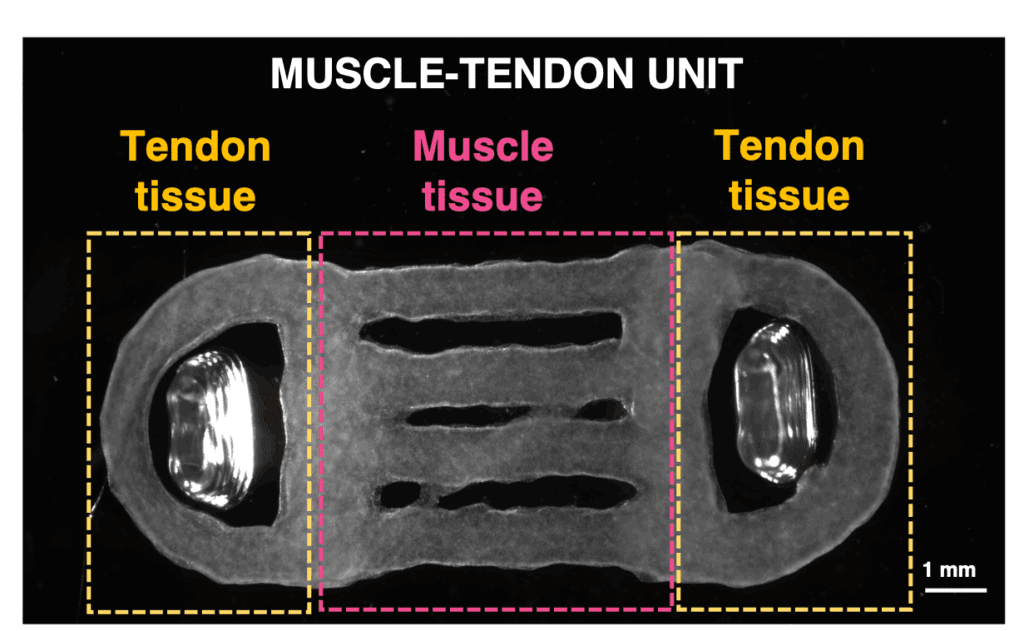
El actuador vivo se creó mediante bioimpresión 3D, con células musculares y anclajes similares a tendones que contienen células de tejido conectivo impresas en una plataforma. Se utilizó un análisis asistido por ordenador para optimizar la forma y la estructura del actuador. En las pruebas de aplicación iniciales, los actuadores bioimpresos en 3D demostraron una capacidad de contracción fiable y estable a largo plazo, lo que supone un avance clave para el uso de componentes biohíbridos en sistemas robóticos.
Aplicaciones en medicina
«El trabajo demuestra cómo se puede aprovechar el tejido biológico diseñado para reproducir la mecánica de los sistemas musculoesqueléticos naturales, lo que supone un avance tanto en la investigación fundamental como en las aplicaciones en los campos de la robótica blanda, la tecnología bioinspirada y la medicina regenerativa», afirma Katzschmann. Una posible aplicación médica es el modelado biomecánico del oído medio, concretamente la interacción entre el estribo (un pequeño hueso) y el músculo estapedio (Musculus stapedius). Otros posibles usos son las prótesis adaptativas, los sistemas robóticos integrados biológicamente o los tejidos de sustitución cultivados en laboratorio.
Adaptado de una noticia del Departamento de Ingeniería Mecánica y de Procesos, ETH Zurich.
Artículo de referencia:
Miriam Filippi, Diana Mock, Judith Fuentes, Mike Y. Michelis, Aiste Balciunaite, Pablo Paniagua, Raoul Hopf, Adina Barteld, Selina Eng, Asia Badolato, Jess Snedeker, Maria Guix, Samuel Sanchez, and Robert K. Katzschmann. Multicellular muscle-tendon bioprinting of mechanically optimized musculoskeletalbioactuators with enhanced force transmission. Science Advances (2025). DOI: 10.1126/sciadv.adv2628



