

Researchers at the Soft Robotics Lab at ETH Zurich in collaboration with the Institute for Bioengineering of Catalonia have developed a biohybrid system that mimics the biological interface between bones and muscles, enabling improved force transmission. This technology could be applied not only in robotics but also in the development of medical implants.
Muscles are powerful, yet flexible and soft. They also possess a high degree of fine motor control, can grasp even delicate objects, and are capable of self-repair in the case of minor injuries. A key factor in the precise and effective transmission of force is the role of tendons, which connect muscles to bones.
To transfer these properties to robotics, scientists are researching biohybrid solutions. They combine synthetic and biological materials to replicate the structure and function of biological tissue and the movement of living organisms. In the future, biohybrid robots could enhance human-machine interaction in fields such as healthcare, medicine, and assistive robotics. This approach could also advance the development of biohybrid implants for humans.
An interdisciplinary research team led by the Soft Robotics Lab at ETH Zurich, with contributions from researchers from the Smart nano-bio-devices group at the Institute for Bioengineering of Catalonia (IBEC), led by Samuel Sánchez, and the University of Barcelona, has succeeded in creating a novel muscle-bone interface The result is a fully functional model made of living biological tissue that replicates the structure of tendons and their transition to muscle —the so-called myotendinous junction—while also allowing improved integration with technical systems.
“Our solution is based on a 3D bioprinted actuator that structurally and functionally mimics the natural connection between muscle and bone,” explains Miriam Filippi, lead author of the scientific paper and researcher at the Soft Robotics Lab, which is led by Professor Robert Katzschmann. The muscle and tendon were created from biological cell tissue and connected to a bone made from synthetic material.
“This study represents a breakthrough in the development of functional muscle-tendon units, laying the foundation for biohybrid systems that bridge biology and robotics,” Katzschmann explains. “We are taking the next major step towards musculoskeletal robots by investigating how to integrate real muscles and tendons into functional units.”
Biology as a model
The biggest challenge was that at the interface between biological and synthetic materials, forces are often poorly transmitted, leading to energy losses. To solve this problem, the team looked to the natural structure of the musculoskeletal system, where tendons serve as intermediaries between muscles and bones. “We developed a tendon made from printed cell tissue, with a stiffness level between that of living muscle and a bone-mimicking rigid segment. This enables a stable coupling of soft biological and rigid synthetic components,” says Filippi.
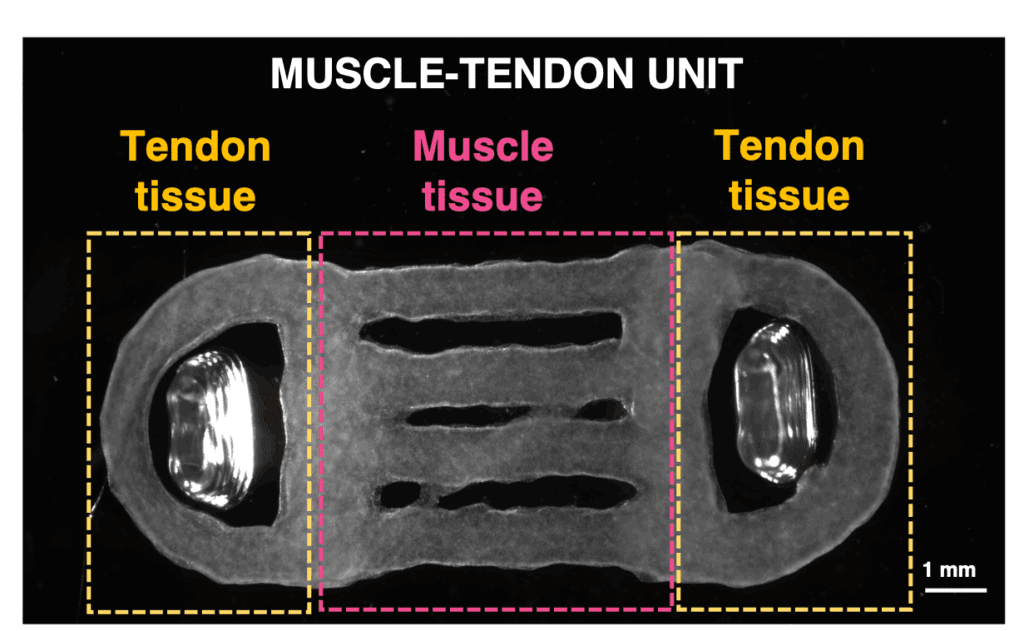
The living actuator was created using 3D bioprinting, with muscle cells and tendon-like anchors containing connective tissue cells printed onto a platform. A computer-assisted analysis was used to optimize the shape and structure of the actuator. In initial application tests, the 3D bioprinted actuators demonstrated reliable and long-term stable contraction ability— a key advancement for the use of biohybrid components in robotic systems.
Applications in medicine
“The work demonstrates how engineered biological tissue can be harnessed to reproduce the mechanics of natural musculoskeletal systems, thereby advancing both fundamental research and applications in the fields of soft robotics, bioinspired technology, and regenerative medicine,” says Katzschmann. One potential medical application is the biomechanical modeling of the middle ear, specifically the interaction between the stapes (a small bone) and the stapedius muscle (Musculus stapedius). Other possible uses include adaptive prosthetics, biologically integrated robotic systems, or lab-grown replacement tissues.
Adapted from news by the Department of Mechanical and Process Engineering, ETH Zurich.
Referenced paper:
Miriam Filippi, Diana Mock, Judith Fuentes, Mike Y. Michelis, Aiste Balciunaite, Pablo Paniagua, Raoul Hopf, Adina Barteld, Selina Eng, Asia Badolato, Jess Snedeker, Maria Guix, Samuel Sanchez, and Robert K. Katzschmann. Multicellular muscle-tendon bioprinting of mechanically optimized musculoskeletalbioactuators with enhanced force transmission. Science Advances (2025). DOI: 10.1126/sciadv.adv2628



